이 책에서 다루는 카메라는 intrusive$($주변 환경에 제약을 둬야하는$)$하지 않는 센서이다.
visual slam framework
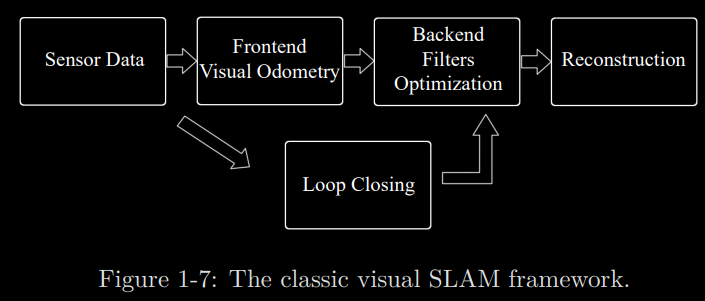
Front end
Visual slam에서 slam의 frontend는 visual odometry이다.
robot의 motion model과 perception model을 정의해서 만든다.
여기서 feature를 추출하면 feature based slam이 된다.
추출하지 않을 시 struct base slam이 된다.
Visual Odometry, Ego motion estimation
Epipolar geometry : monocular camera 2d pixel 좌표 사용.
ICP : binocular cmera, RGB-D 와 같이 깊이 데이터가 얻어 진다면 사용.
PNP : 3D포인터 하나가 카메라의 2D에 사영될 때 사용.
Backend
Backend는 frontend에서 나온 에러를 줄이는 방향으로 optimize 한다.
이때 loop closure도 같이 쓰인다.
Map
- Metric maps
정확한 위치를 알아내기 위해 쓴다.- sparse map : feature based map 특정한 landmark만 기억함.
- dense map $($grid map$)$ 모두 grid에 넣음.
- Topological$($위상수학$)$ maps
- relation amaong map element
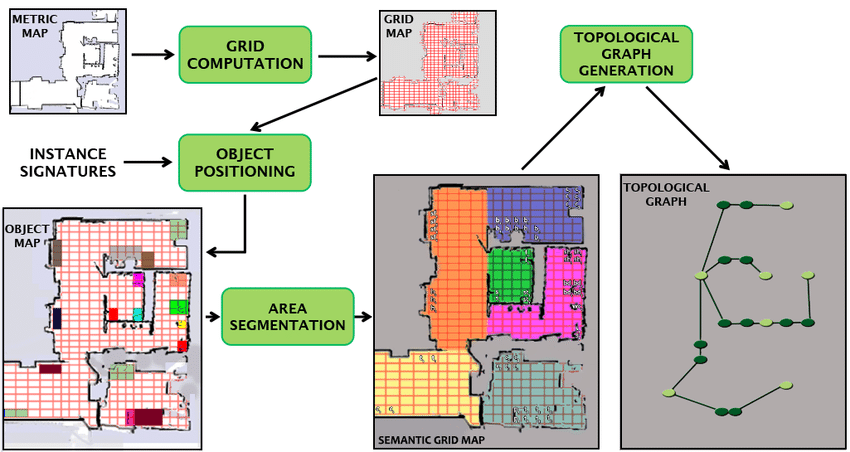
- relation amaong map element
출처
https://opensource.com/article/20/4/linux-binary-analysis
https://www.researchgate.net/figure/Semantic-Grid-Map-and-Topological-Graph-generation-The-metric-map-is-enriched-with_fig6_290480748
Comments